- 机器人控制平台
控制器
机器人控制器平台集运动控制、PLC控制和网络化控制于一体,包括主控制器、示教器、远程IO模块和PC端控制软件,硬件采用多CPU架构,具有通用性、稳定性和实时性的特点。
工艺软件编程环境符合IEC61131-3国际标准,支持EtherCAT、RTEX、MECHATROLINK、CAN等多种工业总线通信协议。机器人控制器平台可与谈球吧在线登陆谈球吧在线登陆控制器实现一体化控制,集成丰富的注塑行业工艺包,有效提升谈球吧在线登陆与机器人协同效率。

技术规范
- 项目描述
- CPU CoreCortexA8 720MHz,256MB DDR3
- DATA FLASH/掉电存储512MB SDCARD/32KB FRAM
- EtherCAT主站支持DC 模式
- NET0、NET1网口2路全双工百兆网口,支持TCP/IP、ModbusTCP、OPC DA协议
- CAN支持CANOpen协议
- Rs485支持ModbusRTU协议
- 系统IO4路输入,4路输出
- 用户IO16路DI,16路DO,NPN方式,输入支持最多2路正交编码或两路脉冲计数
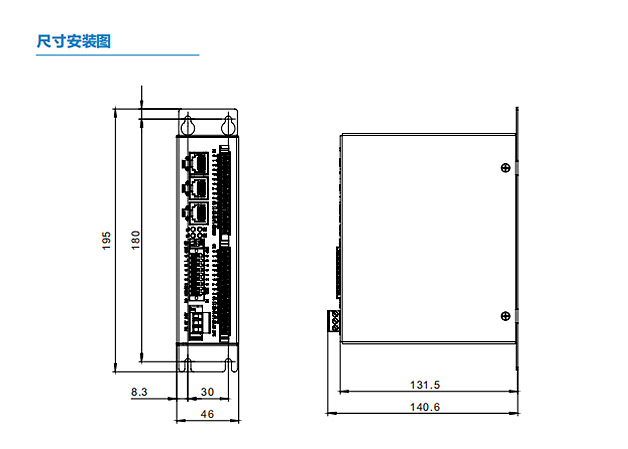
- 安装方式固定孔螺丝安装
产品特点
1、高速以太网总线:基于实时以太网EtherCAT总线设计,具有高带宽、低延时和高同步性,根据用户需求可以同时支持RTEX和MECHATROLINK总线。
2、高精度控制:支持高精度纳米插补,多种类的误差补偿技术,基于动力学的速度前馈功能。
3、多轴联动插补:支持最大八轴的联动插补,最大支持三个附加轴控制。
4、易用性和定制化:支持LUA代码和G代码的混合编程,内嵌符合IEC61131-3标准的PLC模块,用户可以调用标准PLC模块进行编程。
5、丰富的运动学和动力学算法库:系统可以适配通用六关节、Delta、SCARA、四轴搬运以及各种非标结构的机器人。
示教器
示教器采用8英寸液晶屏,1024*768分辨率;基于Linux 操作系统,图形化的界面设计,对话框式的选项设定;支持触摸屏和实体功能按键操作,支持自定义功能键、模式切换钥匙开关,配备急停开关、三段使能开关,支持标准以太网、U盘等接口,用户操作可靠且高效。

技术规范
- 项目描述
- 处理器ARM Cortex-A7,256MB DDR3,256MB FLASH
- 操作系统Linux
- 显示8英寸液晶显示屏,分辨率1024*768
- 控制模式触摸屏/实体按键
- 外部接口1*百兆网络,1*USB HOST
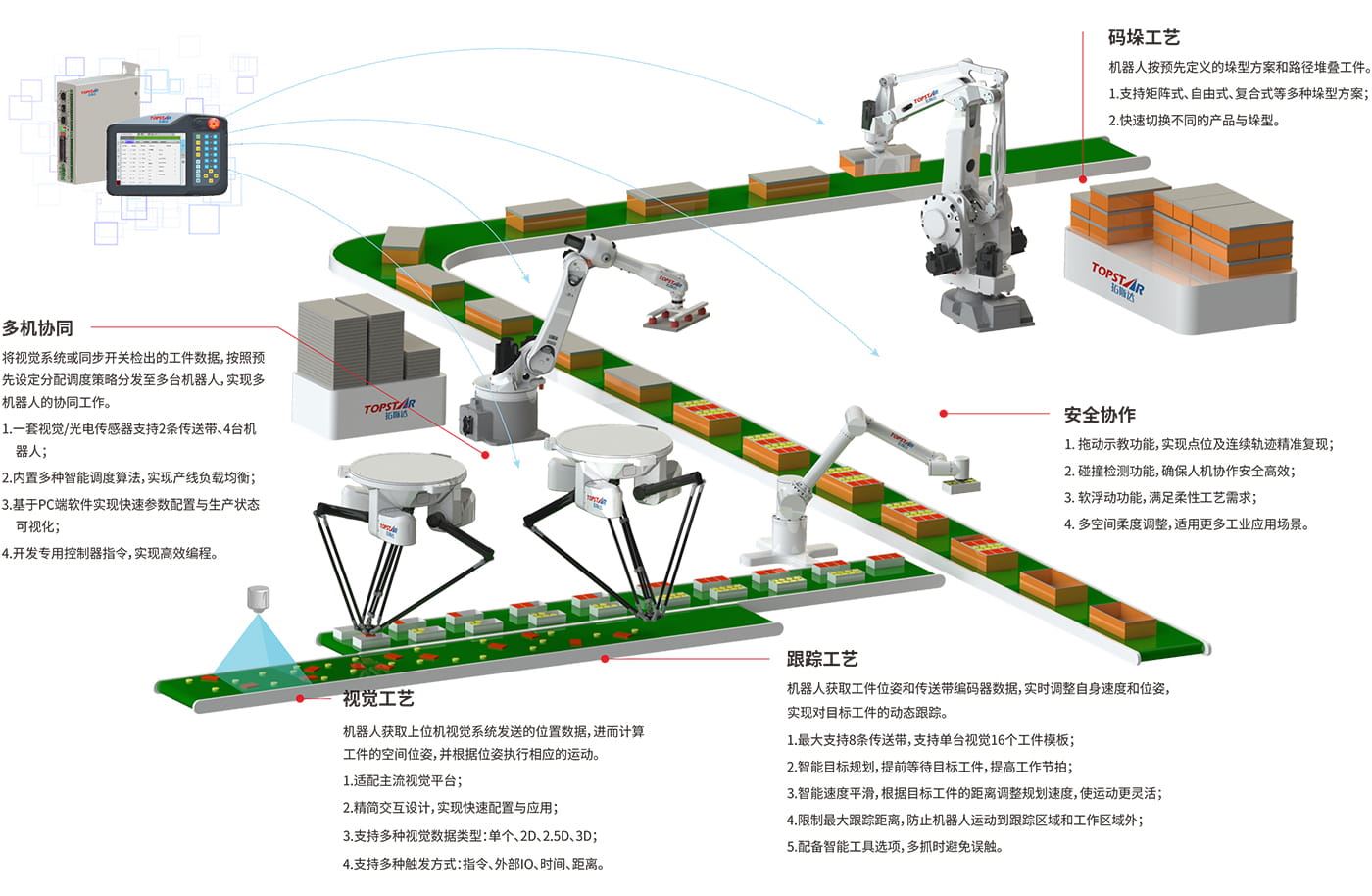
应用场景